ここでは、強化学習のQ-learning をすでに知っていることを前提に解説します。 Q-learningの基本的な解説はあとでまとめたいと思います。 問題設定 フィンガロンの動きを生成するために、状態、行動、報酬、をどう定義したかを説明します。 状態 姿勢(3つのモーターの角度 […]
フィンガロンの位置と方向の検出は、赤と青のマーカーを利用しています。動画での、u, v は二つのマーカーの画像上での座標(左上が0, 0)、dig は、上を0度とし左回りを正とした方向、h, v は水平方向と垂直方向の単位ベクトルを表しています。 単独の色の検出方法は、こちらにま […]
サーボモーターSG90をラズパイで動かす方法は、 aspberry サーボSG90をpython で動かす にまとめました。 シンプルなリモコンプログラムはこちら。 ■実行環境 + Python2.7 + OpenCV3 (OpenCV2でも動くのではと思います) – […]
この週末、作っていたロボットの動画をアップして、ラズパイコンテストに投稿しました。 ホームページにも少しまとめました。 ひとまず一段落です。部屋を片付けました。
回路図です。サーボの電源はまとめられるので、信号線(オレンジ)3本と電源2本(赤と黒)がフィンガロンとラズパイ本体と電源をつなぐ線になります。 サーボへのPWM信号は、GPIOの23, 24 ,25 を使いました(ラズパイは精度の高いPWMを出す仕組みがありますが、3ch は使え […]
這いまわる指型ロボット、フィンガロン(2019, 10/5日公開) こちらで詳しく紹介 普通のモーターで振り子の振り上げを学習 こちらで詳しく解説 ピンポン玉打ち ハンドロボット、ハンドロン (ラズパイコンテスト2018 でグランプリをいただきました) ハンドロンメイキング とっ […]
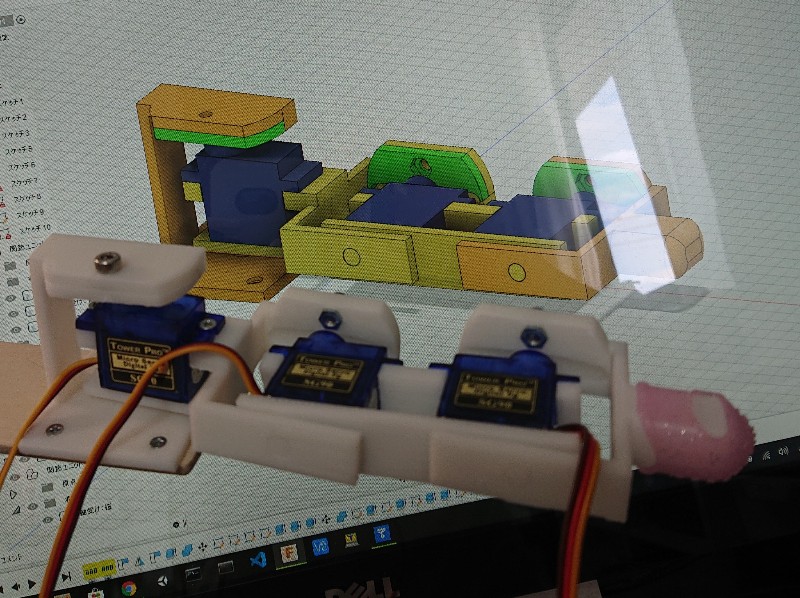
※Qittaにシミュレーションの投稿記事を書きました。 CADで設計したロボットをシミュレーションする [Fusion360 x Unity] 這いまわる指型ロボット、フィンガロン サーボモーター3つで動く、指型ロボットです。QRコードに寄って行きます。前後と左右旋回の動きは、強 […]
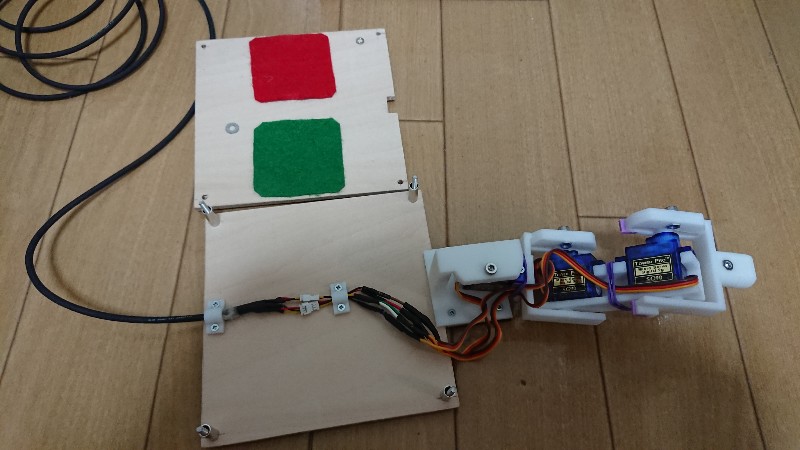
指ロボのボディをバージョンアップさせました。背中の面を四角にして二重にし、ケーブルを間に入れました。背中が広くなりました。 また、指が上下にしなりやすいことが分かったので、そこを強化してプリントしなおしました。 ボディは大分いい感じになりましたが、あとは、中身、前進等のパターンの […]
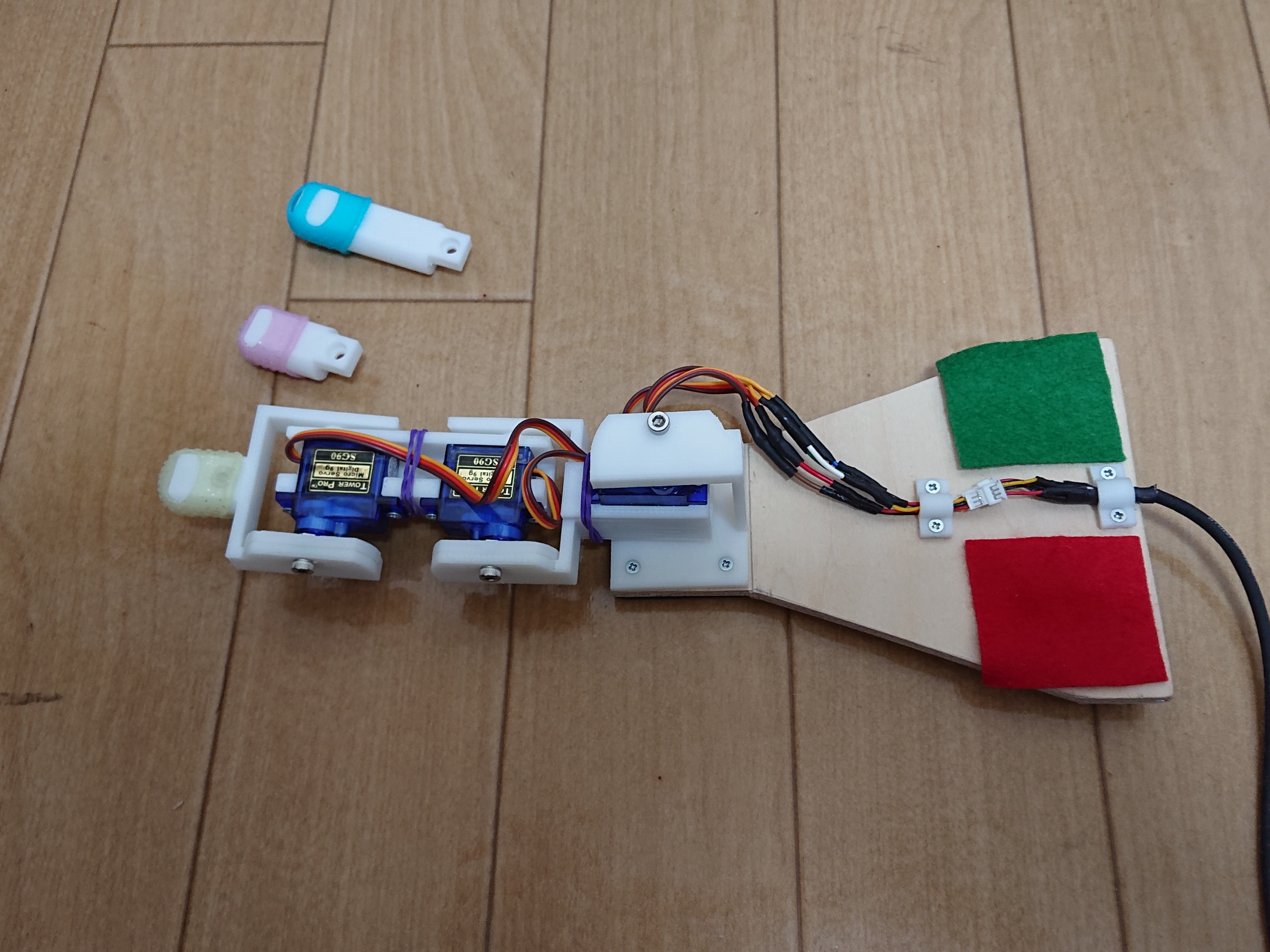
v02はv01とは違ってバラバラになることなく動いてくれます。今は、進むための動きを自動的に獲得できないかをあれこれ試行錯誤しています。 ところで、指の長さが変われば、進むための動かし方も変わるはずです。それを試すのも面白そうなので、簡単に交換できるようにしようと思い付きました。 […]
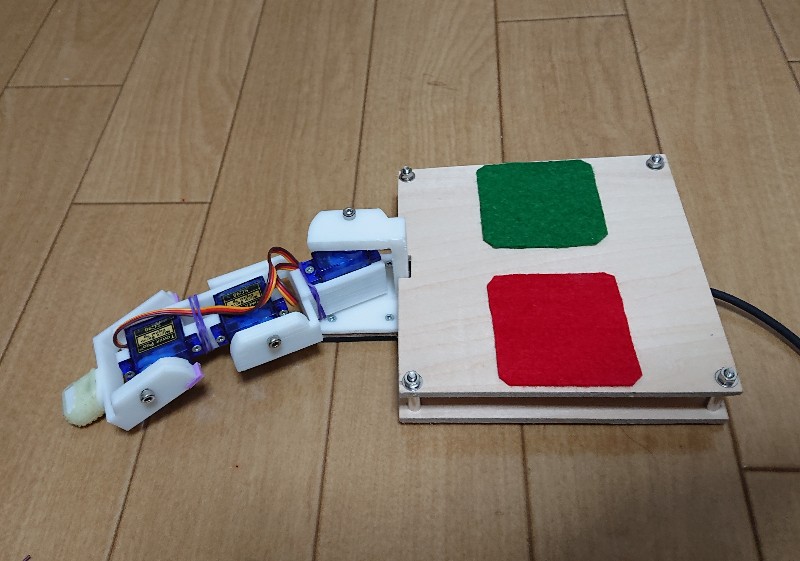
v01は電源を入れて3秒でバラバラになる欠陥品でした。 サーボモーターを定位置で止めようとすると、どうしても振動が起きてしまい、ただはめ込んだだけの接続では簡単に抜けてしまうのです。 そこで、サーボモーターの付け方をもう一度考え直してv02を作りました。 今度はバラバラになりませ […]