最近では、様々な3Dプリンター用の3d データー(stl ファイル)が無料でダウンロードできますね。 キャラクターの3Dモデルにキーフォルダー用のリングをつければ、手軽にキーフォルダーも作れるな!、と思っていたのですが、普通の3D CAD (僕はFusion360を使っています) […]
今まで使っていた3Dプリンター、UP mini が故障したので ANYCUBIC, MEGA-S を購入しました。 現在(2020.1.4)アマゾンで評価数59、星4.1 とかなりの高評価ですが、セットアップ時にいくつかつまずいてしまいそうなポイントがあったので、その対処方を中心 […]
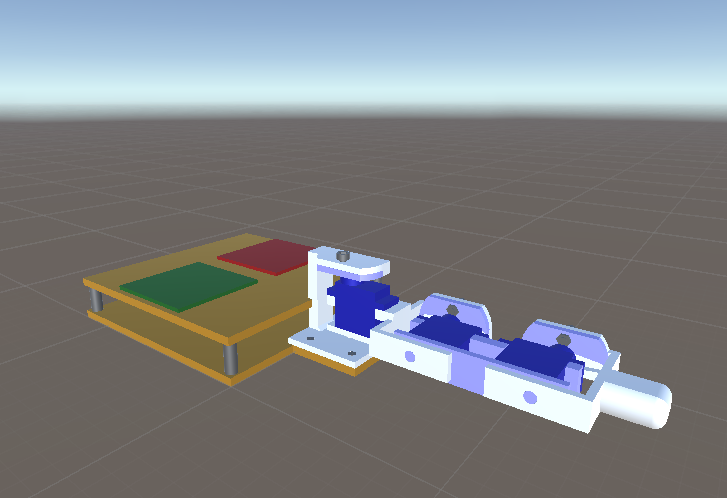
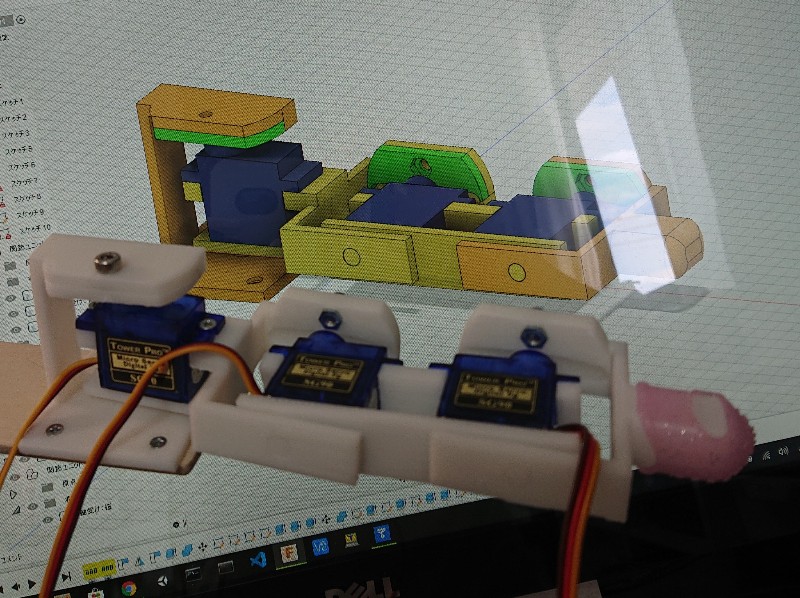
フィンガロンは、Fusion360でデザインして、3Dプリンターで作りましたが、その時のデータをUnityにに入れました。 色は、また、新たに着けました。 Unityをちゃんと勉強して、フィンガロンをこのシミュレーションの中でもぞもぞ動かしたいのです。 あれ、順番が逆ですね。 そ […]
※Qittaにシミュレーションの投稿記事を書きました。 CADで設計したロボットをシミュレーションする [Fusion360 x Unity] 這いまわる指型ロボット、フィンガロン サーボモーター3つで動く、指型ロボットです。QRコードに寄って行きます。前後と左右旋回の動きは、強 […]
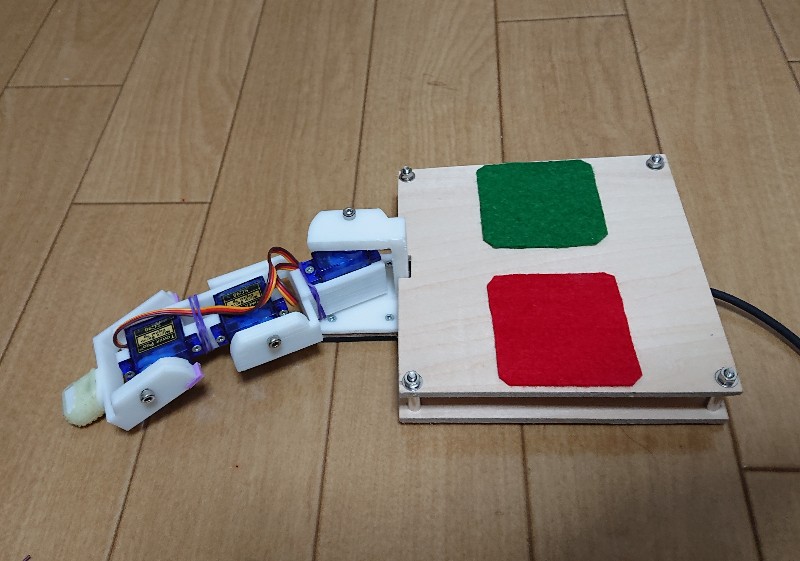
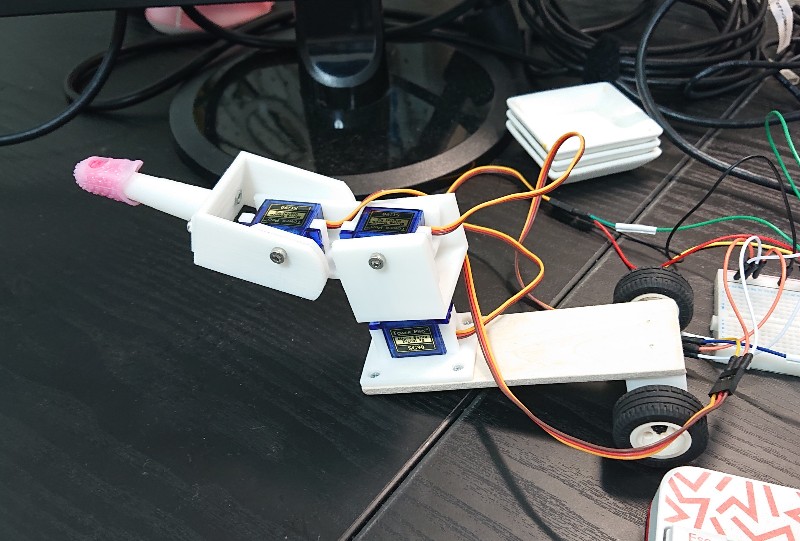
指ロボのボディをバージョンアップさせました。背中の面を四角にして二重にし、ケーブルを間に入れました。背中が広くなりました。 また、指が上下にしなりやすいことが分かったので、そこを強化してプリントしなおしました。 ボディは大分いい感じになりましたが、あとは、中身、前進等のパターンの […]
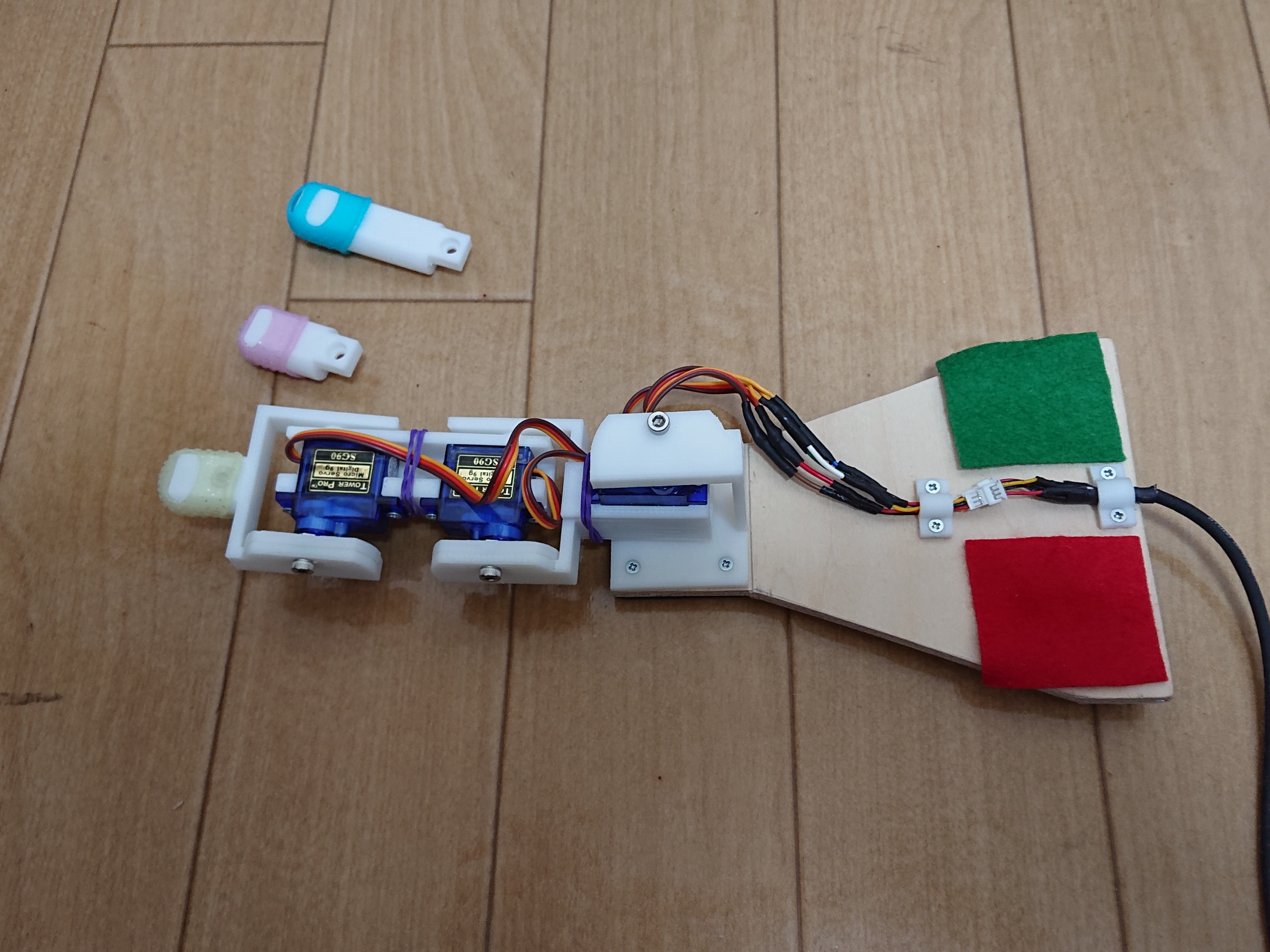
v02はv01とは違ってバラバラになることなく動いてくれます。今は、進むための動きを自動的に獲得できないかをあれこれ試行錯誤しています。 ところで、指の長さが変われば、進むための動かし方も変わるはずです。それを試すのも面白そうなので、簡単に交換できるようにしようと思い付きました。 […]
v01は電源を入れて3秒でバラバラになる欠陥品でした。 サーボモーターを定位置で止めようとすると、どうしても振動が起きてしまい、ただはめ込んだだけの接続では簡単に抜けてしまうのです。 そこで、サーボモーターの付け方をもう一度考え直してv02を作りました。 今度はバラバラになりませ […]
3つのサーボモータでクネクネ動くロボットを考えています。 初号機が完成しましたが、動かしたとたんにぶるぶる震えて、下のモータの軸が外れます。はめ込んでいるだけなので弱いだろうなと思っていましたが、こんなにも簡単に外れるとは思いませんでした。。 軸は、なんと、タップネジで外れないよ […]
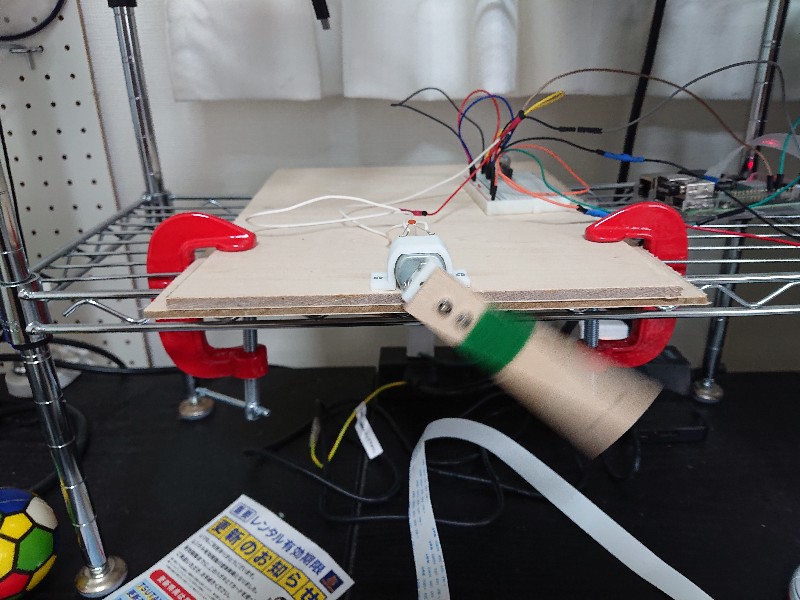
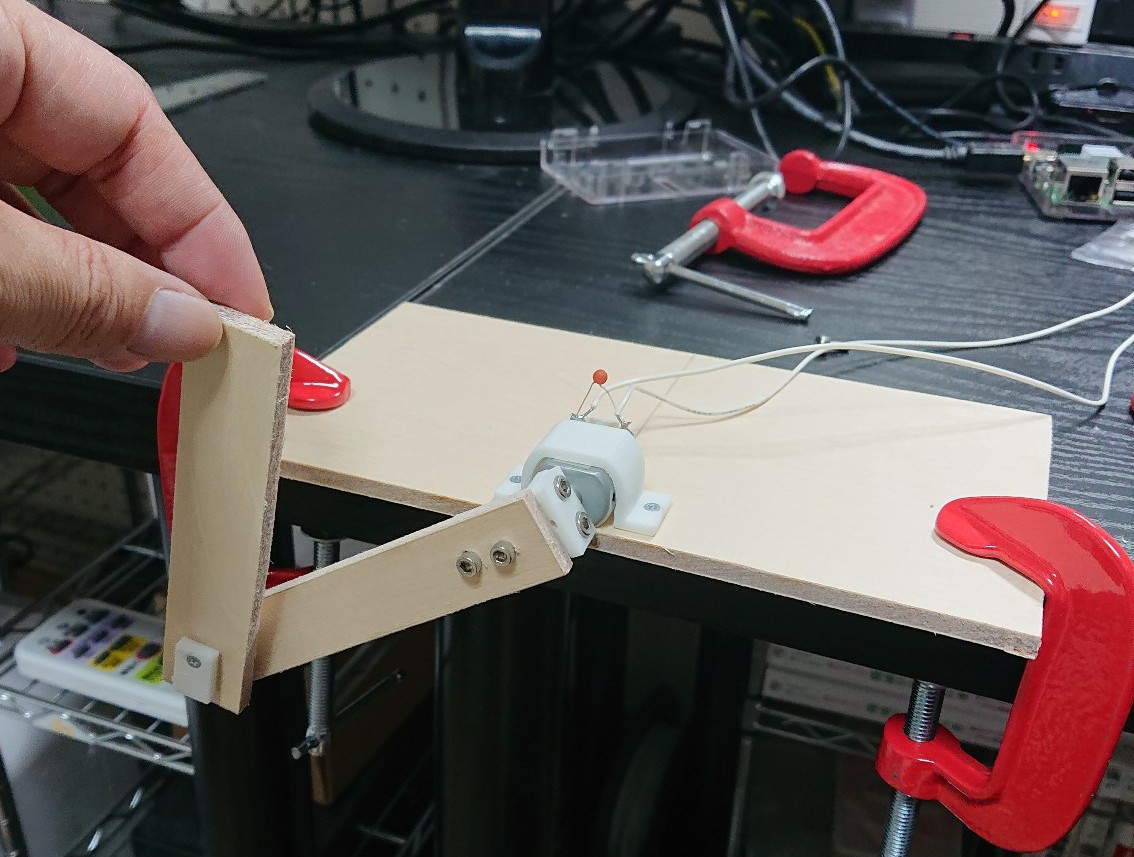
ここのところずっと打ち込んでいるのは、逆さ振り子です。 ミニ四駆などで使われているような普通の直流モーターに、振り子(木の板)を直接取り付けています。 モーターの電圧はプログラムで逆転でき、瞬時に好きな方向にトルク(回転させる力)をかけることができます。 目的は、振り子を上側に上 […]
小学校の理科でも使った、普通のモーターを使った電子工作をしたいなと思っていていました。 だいぶ前からモーターやドライバなどは買ってあったのですが、今週からようやく始めました。 小さい力で反動をつけて棒を立てる、という単純なタスクをまずやるつもりなのですが、昨日はつい難易度のたかい […]