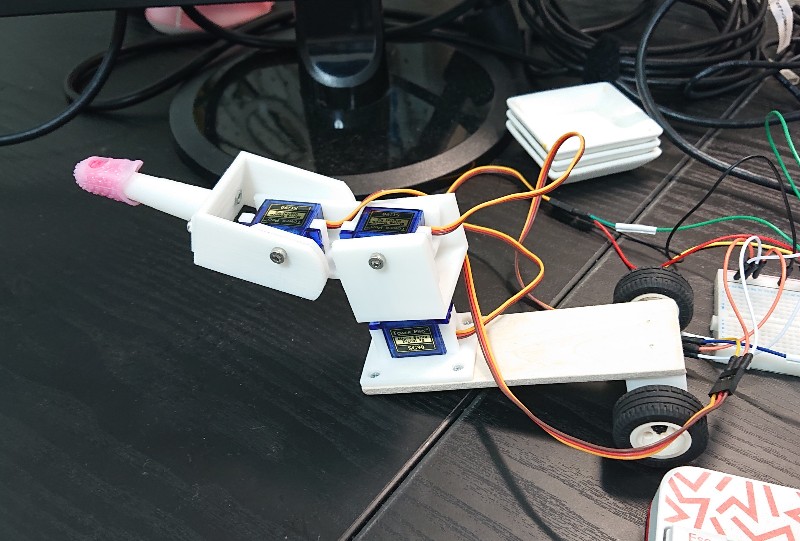
3つのサーボモータでクネクネ動くロボットを考えています。
初号機が完成しましたが、動かしたとたんにぶるぶる震えて、下のモータの軸が外れます。はめ込んでいるだけなので弱いだろうなと思っていましたが、こんなにも簡単に外れるとは思いませんでした。。
軸は、なんと、タップネジで外れないようにできるとのことです。職場の方に教えてもらいました。早速試してガッチリ固定できました。
しかし、先に固定すると組み立てが最後までできないことが分かりました。
作ってみて分かることが結構あります。今、バージョン02の設計に取りかかっています。
コメントを残す