※Qittaにも投稿記事を書きました。こちらでは内容を一括して読むことができます。
CADで設計したロボットをシミュレーションする [Fusion360 x Unity]
ここでは、3DCADソフト「Fusion 360」 で作成したロボットを、ゲームの統合開発環境である「Unity」で動かした方法を覚書としてまとめていきます。
Fusion360 は高性能な3DCADソフトです。非商用目的で個人で使う場合には、無料で使用することができます。
Unityは、2Dや3Dのアプリを開発するソフトで、剛体シミュレーターも内蔵しています。これも無料で始めることができます。
筆者も、この2つのソフトに関してはまだ初心者です。もしかしたらもっと良いやり方があるかもしれませんので、のでご了承ください。
ここで使用した3Dデータ(Fingalone.obj)、コントロールプログラム(control_pattern.cs)は、github から利用可能です。
では、どんな感じになったかをまず見てください。
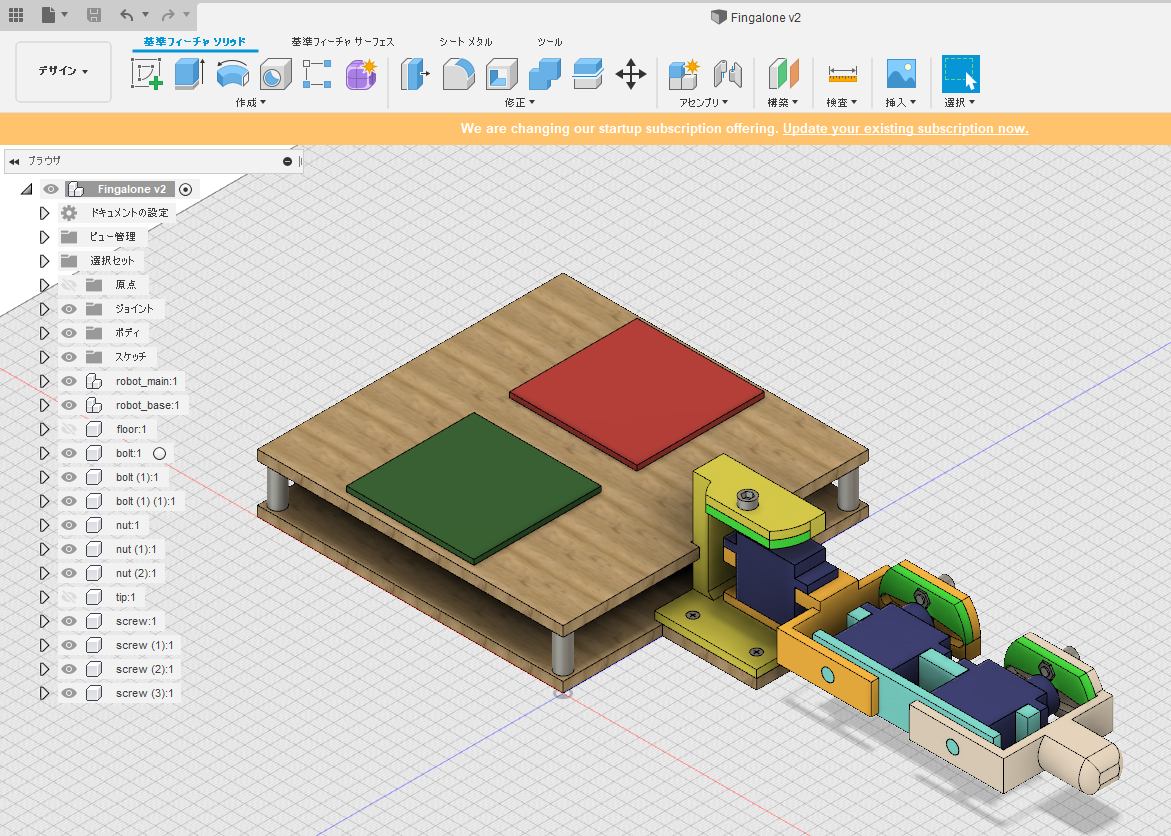
Fusion360 で設計したロボット(Fingalone)です。
これをUnity で取り込んで、色を付けなおしたのがこれです。
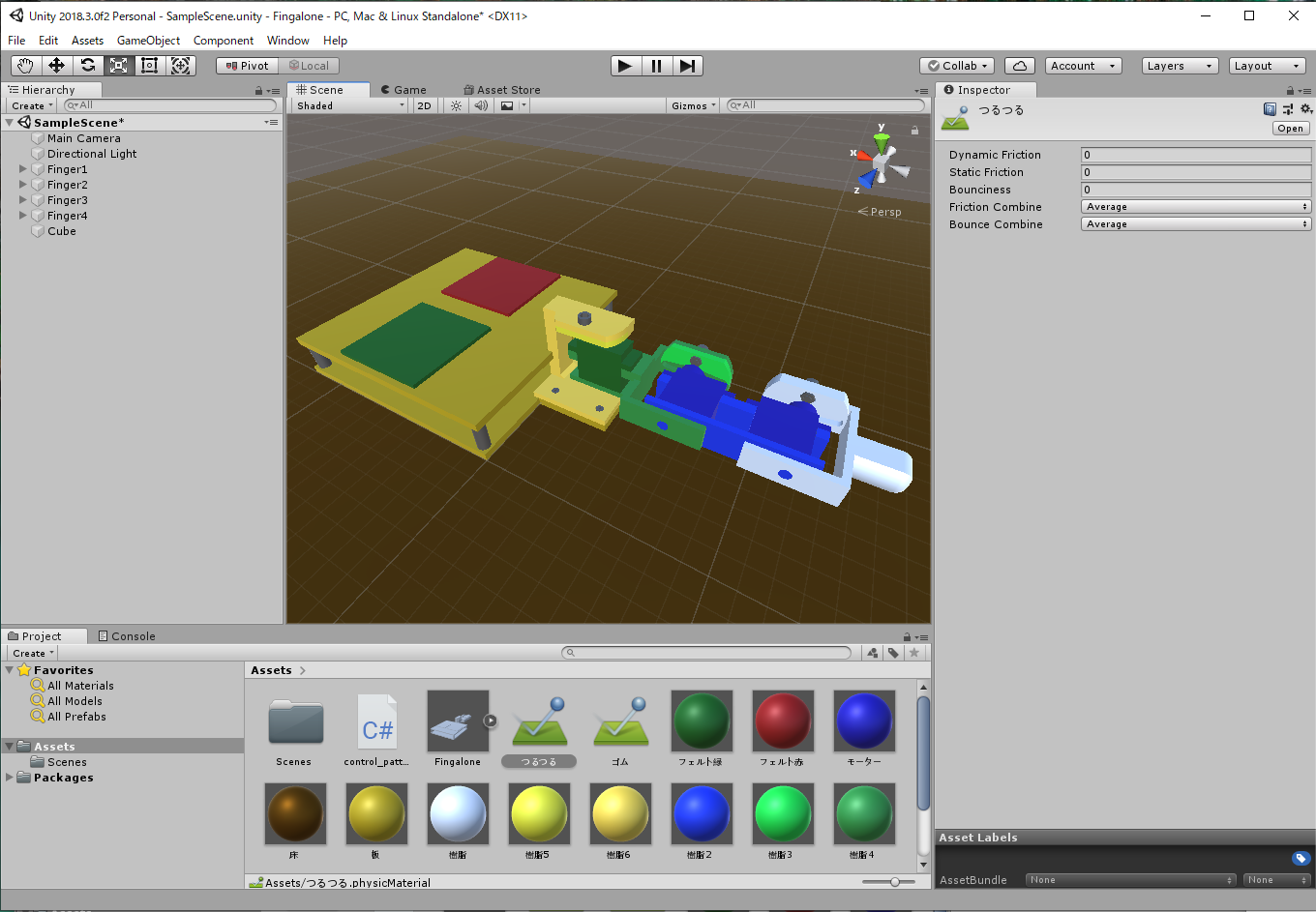
Joint を定義して、キーボードに動きを割り当ててリモコン操作した様子です。シミュレーションなので現実にはあり得ない動きもできてしまいます。
ちなみに、実物として作ったものはこちらです。
今回は、実物を先に作りましたが、CADでデータを作った段階で、動きをUnity でシミュレーションをして確かめてから、実物を作るなんていうことができますよね。
Fusion + Unity で夢が広がります。
目次
01 CADデータをUnityに取り込んで着色する
02 関節や剛体などの特性を定義する
03 プログラムで動かす