DCモーターにはエンコーダーがついていないのでモーターから角度を知ることはできない。また、エンコーダーをつけたとしても、プーリーベルトがしょっちゅう滑りを起こすので、正確に測定することはできない。
そこでカメラ画像から角度を推定することを考える。
カメラの設定
まずは、できるかぎり高速でカメラモニターできる設定を考える。カメラは、ラズパイ専用カメラ、Camera Module V2 を使用した。このカメラは、640 x 480 の解像度ならば 200FPSで撮影できると言われている。
プログラムの環境は、
python 2.7.13
opencv 3.3.1 インストールはここを参考にしました(以下抜粋)。
wget https://github.com/mt08xx/files/raw/master/opencv-rpi/libopencv3_3.3.1-20171126.2_armhf.deb sudo apt install -y ./libopencv3_3.3.1-20171126.2_armhf.deb sudo ldconfig
で、picamera というCamera Module の python interface を使用。
公式ページは、こちら。
できるだけ高速にカメラ画像を取得したいと、いろいろ試した末に、最終的に採用した方法が以下のスレッドを使う方法(それでも50Hz。もっと良い方法があればだれか教えてほしいです。。)。
サンプルプログラムの使い方は、プログラム名をsample_picam_thread.py として、
>>> python sample_picam_thread.py xxx
xxx には fast, middle, middle2, large のどれかを入れる。
それぞれ以下のモードでカメラが起動する。
fast: 320 x 240, 50-58Hz (画角がなぜか狭い)
middle: 320 x 240, 30-35Hz (なぜかframerateを抑えると画角が戻る)
middle2: 640 x 480, 18-20Hz (VGAサイズ)
large: 1920 x 1080, 4Hz
# coding: utf-8
from picamera.array import PiRGBArray
from picamera import PiCamera
from threading import Thread
import cv2
import time
class PiVideoStream:
def __init__(self, resolution=(320, 240),
shutter_speed=20000,
iso=400,
framerate=70):
self.camera = PiCamera()
self.camera.resolution = resolution
self.camera.framerate = framerate
self.camera.shutter_speed=shutter_speed
self.camera.iso = iso
self.rawCapture = PiRGBArray(self.camera, size=resolution)
self.stream = self.camera.capture_continuous(self.rawCapture,
format="bgr", use_video_port=True)
self.frame = None
self.stopped = False
self.c = 0
self.prev_c = 0
def start(self):
self.thread=Thread(target=self.update, args=())
self.thread.daemon=True
self.thread.start()
return self
def update(self):
for f in self.stream:
self.c = self.c + 1
if self.c > 10000:
self.c = 0
self.frame = f.array
self.rawCapture.truncate(0)
if self.stopped:
self.stream.close()
self.rawCapture.close()
self.camera.close()
return
def read(self):
while self.c == self.prev_c:
time.sleep(0.001)
self.prev_c = self.c
return self.frame
def stop(self):
self.stopped = True
if __name__=='__main__':
import sys
argvs = sys.argv
mode = 'fast'
if len(argvs) > 1:
mode = argvs[1]
if mode == 'fast': # 50-58Hz
vs = PiVideoStream(resolution=(320, 240),
shutter_speed=20000,
iso=100,
framerate=60).start()
elif mode == 'middle': # 30-35Hz
vs = PiVideoStream(resolution=(320, 240),
shutter_speed=20000,
iso=100,
framerate=40).start()
elif mode == 'VGA': # 18-20 Hz
vs = PiVideoStream(resolution=(640, 480),
shutter_speed=20000,
iso=100,
framerate=40).start()
elif mode == 'large': # 4Hz
vs = PiVideoStream(resolution=(1920, 1080),
shutter_speed=20000,
iso=100,
framerate=30).start()
time.sleep(2.0)
# for ftp
prev_t = 0
current_t = 0
cnt = 0
while True:
# fps
current_t = time.time()
cnt += 1
if current_t - prev_t > 1.0:
dt = current_t - prev_t
prev_t = current_t
fps = cnt / dt
cnt = 0
print('fps = %.2f' % fps)
# capture
frame = vs.read()
cv2.imshow("Frame", frame)
INPUT = cv2.waitKey(1) & 0xFF
if INPUT == ord('s'):
cv2.imwrite('img.png', frame)
print('img is saved.')
if INPUT == ord('q'):
cv2.destroyAllWindows()
vs.stop()
break
作成したサンプルプログラムは、以下を参考にしたのだが、空回り現象でftp が盛って見える現象を修正したら、50Hz 程度になった。
振り子には、上記の’fast’ の設定で使うことにした。しかし、なぜかframerate だけが遅い middle に比べて画角が狭くなってしまうのだ。
middle の画角は、以下。

fast の画角は、以下。

謎だ。
ちなみに、上記の方法だとVGA (640 x 480)の解像度では20fps 程度しか出ない。これだったら、以下のように、普通のusb camera として opencv を使って取得した方が簡単だし速い。30fps出る。
# coding: utf-8
import cv2
import numpy as np
import time
cap = cv2.VideoCapture(0)
prev_t = 0
current_t = 0
cnt = 0
while True:
# fps の計算
current_t = time.time()
cnt += 1
if current_t - prev_t > 1.0:
dt = current_t - prev_t
prev_t = current_t
fps = cnt / dt
cnt = 0
print('fps = %.2f' % fps)
# カメラ画像表示
ret, img = cap.read()
cv2.imshow('img', img)
# ’q’ で終了
INPUT = cv2.waitKey(10) & 0xFF
if INPUT == ord('q'):
cv2.destroyAllWindows()
break
角度の推定
振り子の下側から見上げるようにカメラを机上に配置し、振り子に張り付けた緑色のフェルトの色を検出、その重心をOpenCVを使って算出する。
振り子が回転するとき、その重心点の軌跡は楕円形となる。その楕円の位置を前もって記録しておけば(uとvの最大値と最小値でよい)、現時点での振り子の位置から、楕円内での振り子の角度が近似的に計算できる。
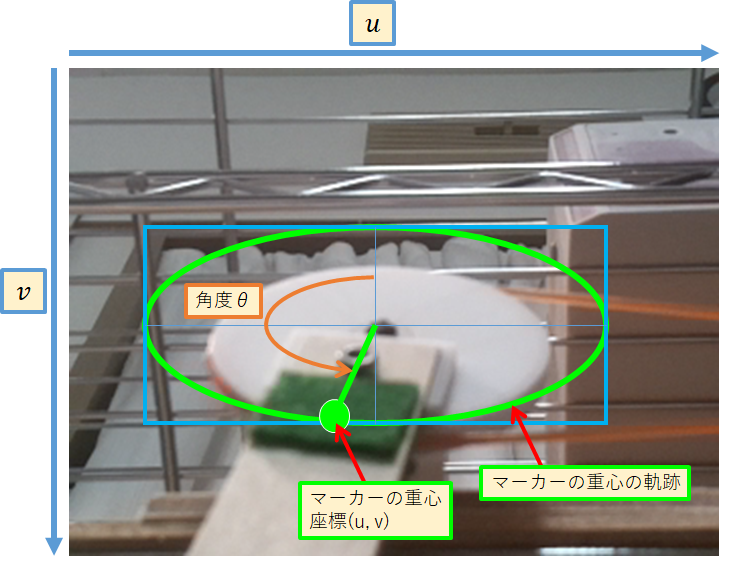
マーカーの重心位置から角度を算出するプログラムはこんな感じになる。
import numpy as np
def cal_theta(u, v):
nu = 1.0 * (u - center_u) / (max_u - min_u)
nv = 1.0 * (v - center_v) / (max_v - min_v)
return np.arctan2(-nu, -nv)
max_u, min_u … 楕円上でのu の最大値と最小値
max_v, min_v … 楕円上でのv の最大値と最小値
center_u, center_v … 楕円の中心