ROSの理解を深めたいと思っています。
「UnityとROSで学ぶ移動ロボット入門 UI作成編」の紹介 – Unityステーション
というyoutube 動画を見て、
ここで紹介されている
UnityとROSで学ぶ移動ロボット入門 UI作成編 を試してみました。
Ubuntu側(windowsのWSLで動かす)でモバイルロボットのシミュレーターGazeboを立ち上げ、WindowsのUnity からその操作やカメラ画像の受け取りなどをするところまで作るというチュートリアルです。
チュートリアルはとても丁寧で分かりやすかったです。ほとんどスムーズに進められました(ただし、LiDARだけできませんでした。raspimouseの中に、lidar_linkオブジェクトが存在していなかった。なぜ?)。
今回は、準備されているスクリプトの内容までは理解せず進めましたが、時間のある時にこの中身をちゃんと理解したいです。
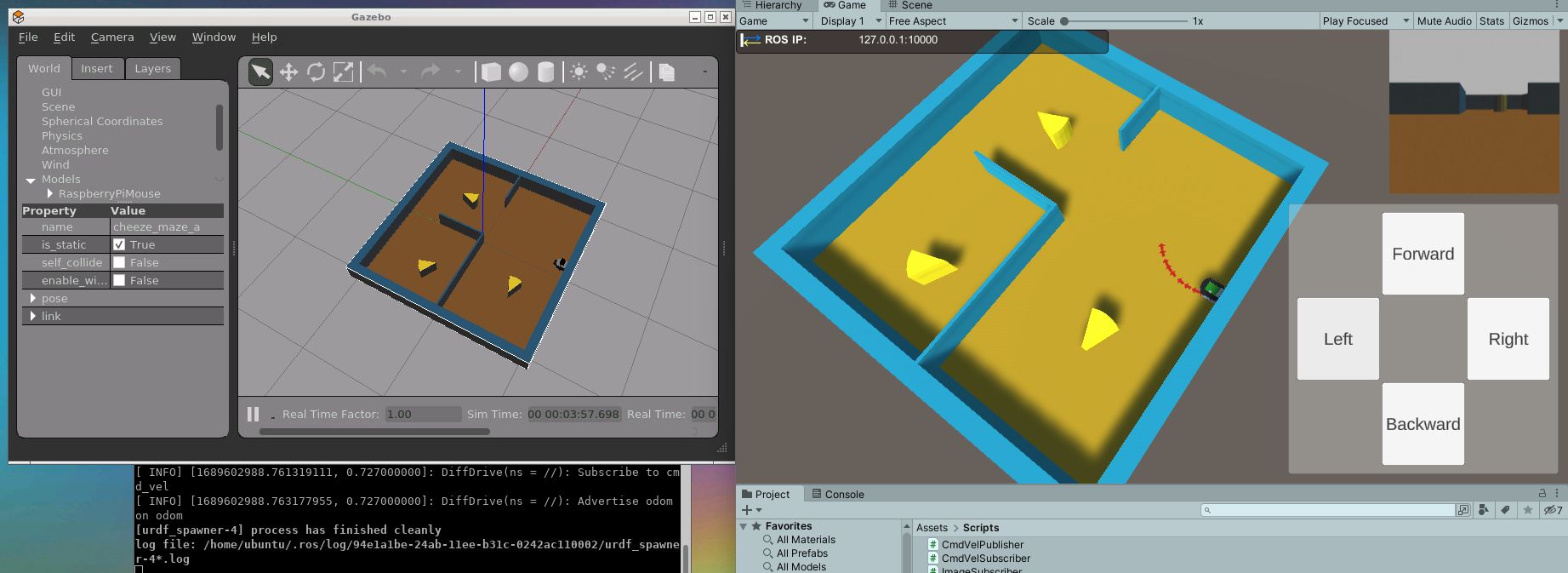
下のスクリーンショットは、左側がGazebo、右側がUnityです。右下のUnityで作った操作パネルでGazeboのロボットを操作し、その位置変化をUnity上で反映するという内容です。右上の画像が、ロボットに備えられたカメラ画像です。これはGazeboでカメラをシミュレートした画像を、Unityが受け取って表示しています。
ROSで作っているので、今回使ったシミュレーターを実機にすり替えれば、そのままUnity で実機を操作できてしまうということなんですよね。。すごい!
コメントを残す